soxs_spatial_solution - PLANNED ∞
The purpose of this recipe is to further enhance the wavelength solution achieved with soxs_disp_solution by expanding the solution into the spatial dimension (along the slit). This 2-dimensional solution will then account for any tilt in the spectral lines.1
Each pinhole in the multi-pinhole mask is \(\text{0.5"}\) in diameter and the 9 pinholes are evenly spaced along the \(\text{11"}\) slit with a \(\text{1.4"}\) gap between adjacent holes. This knowledge affords us the ability to now map the dispersion solution along the spatial direction.
Input ∞
| Data Type | Content | Related OB |
|---|---|---|
| FITS Image | Arc Lamp through multi-pinhole mask | SOXS_slt_cal_VISArcsMultiplePinhole, SOXS_slt_cal_NIRArcsMultiplePinhole |
| FITS Image | Master Dark Frame (VIS only) | - |
| FITS Image | Master Bias Frame (VIS only) | - |
| FITS Image | Dark frame (Lamp-Off) of equal exposure length as multi-pinhole frame (Lamp-On) (NIR only) | SOXS_slt_cal_NIRArcsMultiplePinhole |
| CSV File | First-guess Dispersion Map table |
|
| CSV File |
Method ∞
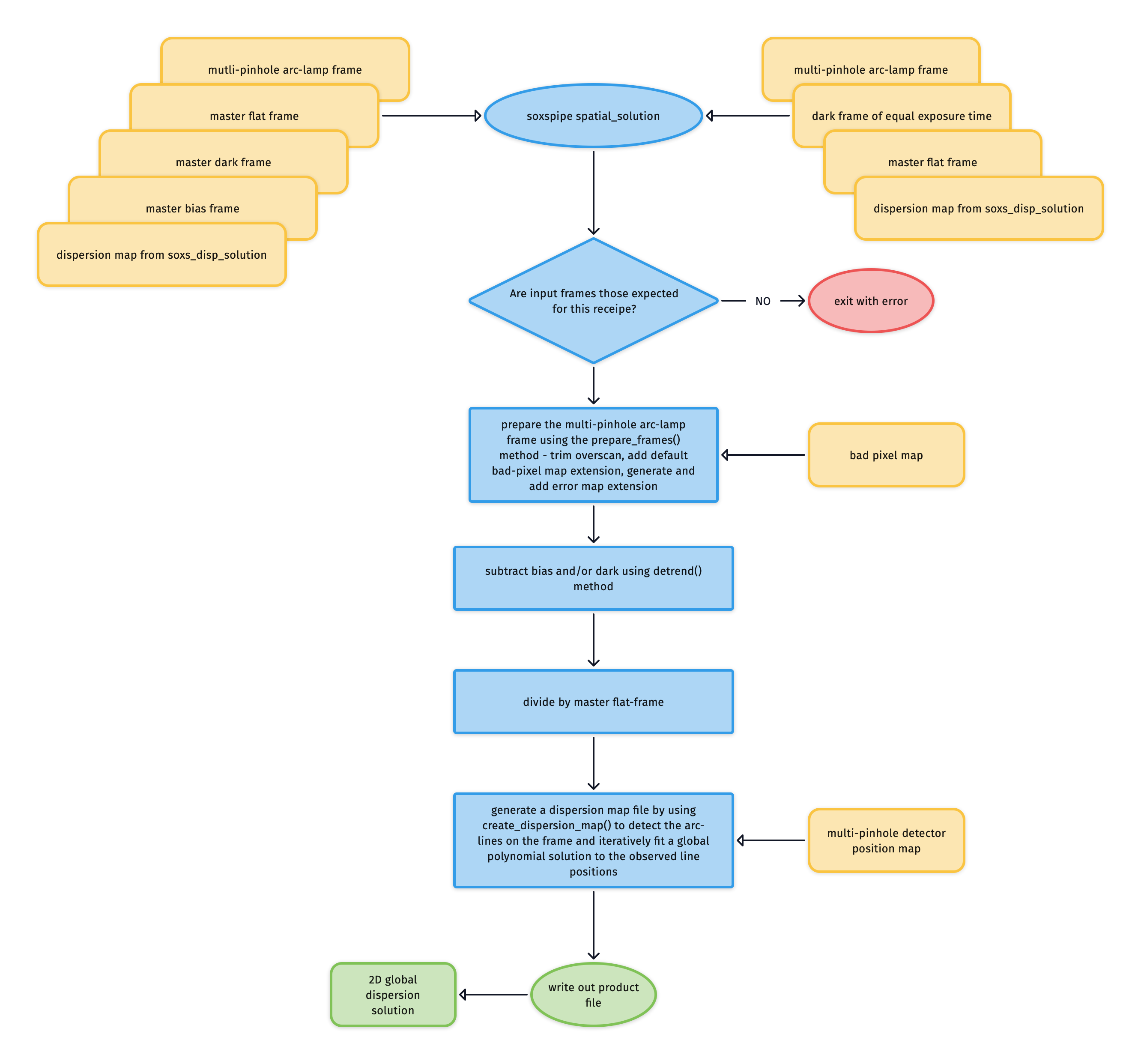
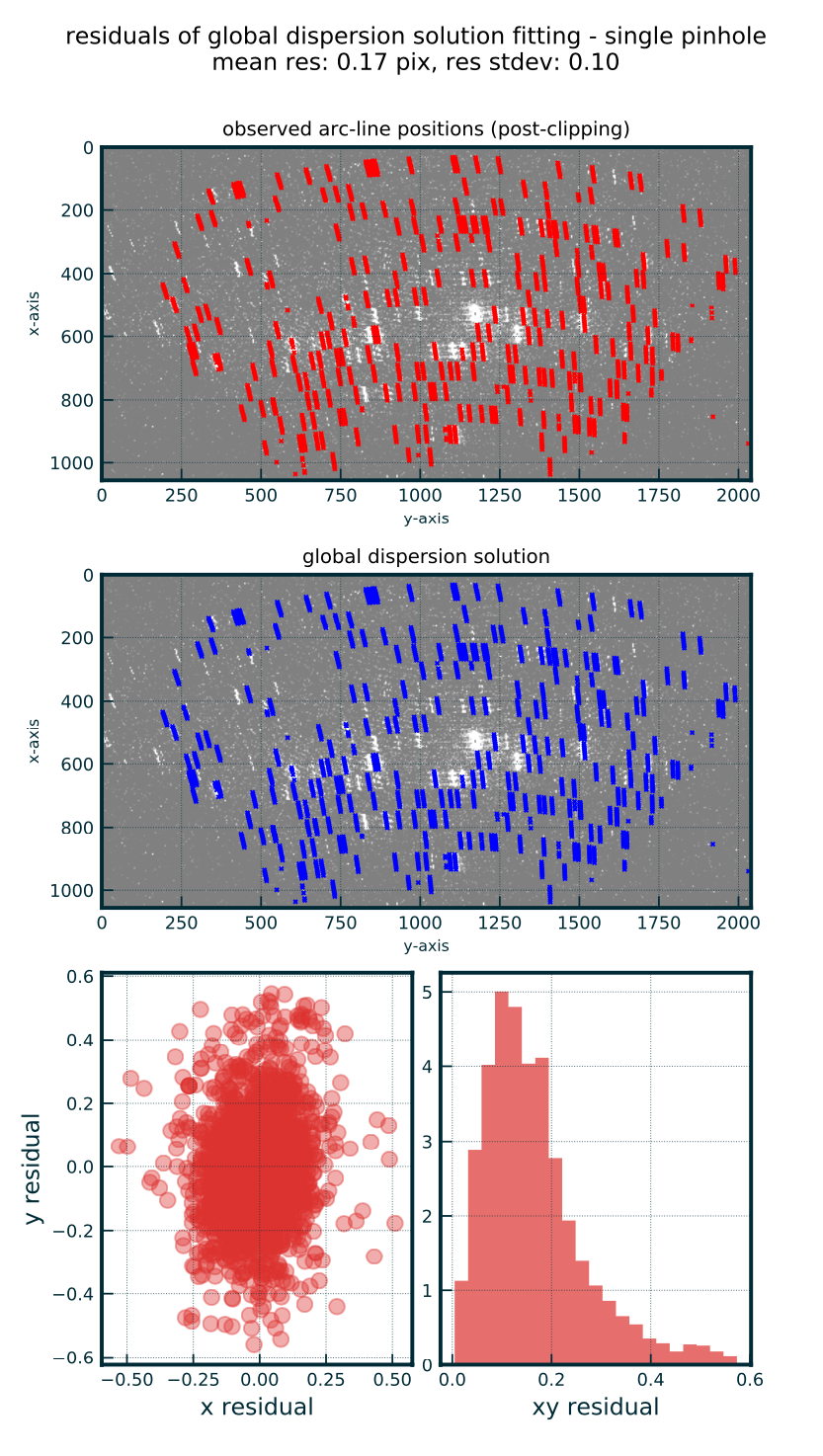
Having prepared the multi-pinhole frame the bias and dark signatures are removed and the frame is divided through by the master flat frame. The calibrated frame and the first-guess dispersion map are passed to the create_dispersion_map utility to produce a 2D dispersion solution covering both the spectral and spatial dimensions.
Output ∞
| Data Type | Content |
|---|---|
| CSV File (subject to change) | Dispersion Map table giving coefficients of polynomials describing 2D dispersion/spatial solution |
Recipe API ∞
-
class
soxs_spatial_solution(log, settings=False, inputFrames=[], verbose=False, overwrite=False, create2DMap=True, polyOrders=False)[source] ∞ The soxs_spatial_solution recipe
Key Arguments
log– loggersettings– the settings dictionaryinputFrames– input fits frames. Can be a directory, a set-of-files (SOF) file or a list of fits frame pathsverbose– verbose. True or False. Default Falseoverwrite– overwrite the prodcut file if it already exists. Default Falsecreate2DMap– create the 2D image map of wavelength, slit-position and order from disp solution.polyOrders– the orders of the x-y polynomials used to fit the dispersion solution. Overrides parameters found in the yaml settings file. e.g 345435 is order_x=3, order_y=4 ,wavelength_x=5 ,wavelength_y=4, slit_x=3 ,slit_y=5. Default False.
See
produce_productmethod for usage.Todo
add a tutorial about
soxs_spatial_solutionto documentation
relative to the perpendicular of the dispersion direction ↩