soxs_disp_solution ∞
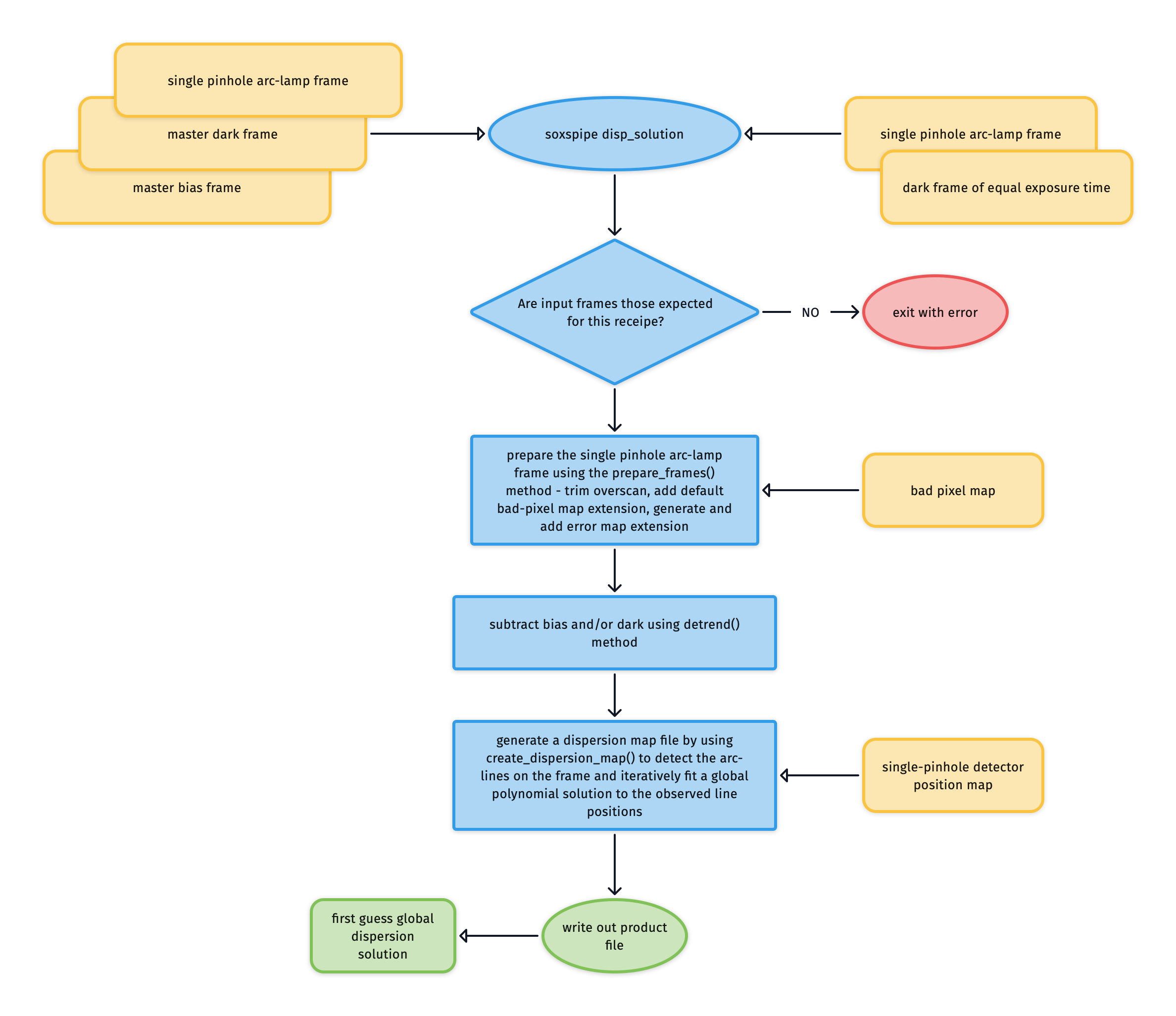
The purpose of the soxs_disp_solution is to use a single-pinhole arc-lamp frame (example image above) to generate a first guess dispersion solution.
Input ∞
As input this recipes accepts the Pinhole Map file.


| Data Type | Content | Related OB |
|---|---|---|
| FITS Image | Arc Lamp through single pinhole mask | SOXS_slt_cal_VISArcsPinhole, SOXS_slt_cal_NIRArcsPinhole |
| FITS Image | Master Dark Frame (VIS only) | - |
| FITS Image | Master Bias Frame (VIS only) | - |
| FITS Image | Dark frame (Lamp-Off) of equal exposure length as single pinhole frame (Lamp-On) (NIR only) | SOXS_slt_cal_NIRArcsPinhole |
| CSV File |
Parameters ∞
| Parameter | Description | Type | Entry Point | Related Util |
|---|---|---|---|---|
| pixel-window-size | the side-length (in pixels) of the square window used to search for arc-line detection | int | settings file | |
| order-deg | the order of polynomial used to fit spectral-orders of detected arc-lines | int | settings file | |
| wavelength-deg | the order of polynomial used to fit wavelengths of detected arc-lines | int | settings file | |
| poly-fitting-residual-clipping-sigma | sigma distance limit, where distance is the difference between the detected and polynomial fitted positions of an arc-line, outside of which to remove lines from the fit | float | settings file | |
| poly-clipping-iteration-limit | number of sigma-clipping iterations to perform before settings on a polynomial fit for the dispersion solution | int | settings file |
Method ∞
After preparing and calibrating the single-pinhole arc-lamp frame (using the detrend), the create_dispersion_map) util is employed to detect and measure the positions of the arc lines on the frame. Below you can see the bright arc-lines outshining the traces of the order-centres and the detection of one of these lines during the create_dispersion_map) util.


Once the line positions have been measured, a dispersion solution is generated by iteratively fitting a global polynomial against the observed line-positions (see create_dispersion_map) for details). The final product is a Dispersion Map file.
Output ∞
| Data Type | Content |
|---|---|
| CSV file (subject to change) | First guess Dispersion Map |
QC Metrics ∞
The typical solution for the soxs_disp_solution recipe has sub-pixel residuals.

| Metric | Description |
|---|---|
| TBC | … |
Recipe API ∞
-
class
soxs_disp_solution(log, settings=False, inputFrames=[], verbose=False, overwrite=False)[source] ∞ generate a first approximation of the dispersion solution from single pinhole frames
Key Arguments
log– loggersettings– the settings dictionaryinputFrames– input fits frames. Can be a directory, a set-of-files (SOF) file or a list of fits frame paths.verbose– verbose. True or False. Default Falseoverwrite– overwrite the prodcut file if it already exists. Default False
Usage
from soxspipe.recipes import soxs_disp_solution disp_map_path = soxs_disp_solution( log=log, settings=settings, inputFrames=sofPath ).produce_product()
Todo
add a tutorial about
soxs_disp_solutionto documentation